機(jī)械社區(qū)
標(biāo)題: 教程丨基于HCR平臺(tái)的自動(dòng)導(dǎo)航系統(tǒng)(一) [打印本頁(yè)]
作者: SLAMTEC思嵐科技 時(shí)間: 2017-1-25 10:35
標(biāo)題: 教程丨基于HCR平臺(tái)的自動(dòng)導(dǎo)航系統(tǒng)(一)
服務(wù)機(jī)器人的核心問(wèn)題在于自主定位與導(dǎo)航,它主要包括幾大問(wèn)題:+ r% ?$ j3 t6 }/ F; G
無(wú)需用戶(hù)干預(yù),機(jī)器人自主構(gòu)建環(huán)境地圖,?
實(shí)時(shí),、高精度的獲取機(jī)器人所在位置,?
有效規(guī)避環(huán)境障礙,,抵達(dá)目標(biāo)地點(diǎn),?
在未知環(huán)境中,,有效規(guī)劃兩地之間最短路線,?
有了相應(yīng)解決方案后,,對(duì)于服務(wù)機(jī)器人廠商,還需要考慮如何快速與現(xiàn)有系統(tǒng)整合,,加快產(chǎn)品上市,?在高性能與低成本間如何獲得平衡?
' ~3 {8 T1 H; H9 a& d! C% w六大問(wèn)題,,一個(gè)對(duì)策
SLAMWARE系統(tǒng)就夠了
SLAMWARE系統(tǒng)由高性能激光雷達(dá)RPLIDAR與定位控制引擎核心SLAMWARE Core構(gòu)成,。& }& e& \1 g. I- _
SLAMWARE直接與RPLIDAR連接,并通過(guò)Control Bus與底盤(pán)連接,。其中,,High Speed Bus是一個(gè)高速的100M以太網(wǎng),負(fù)責(zé)與人機(jī)交互系統(tǒng)連接,,并傳輸?shù)貓D數(shù)據(jù),。0 g8 m5 G6 F: E7 ~0 P! V; N6 \: w
SLAMWARE Core還支持超聲波傳感器、防跌落傳感器,、碰撞傳感器和深度攝像頭的數(shù)據(jù),,將它們和激光雷達(dá)的數(shù)據(jù)融合在一起,利用信息融合,,使機(jī)器人實(shí)現(xiàn)更加智能、實(shí)用的自主運(yùn)動(dòng),。
$ F. x: Y8 [, h; d: i' G) E8 q l看夠了枯燥的文字說(shuō)明和產(chǎn)品圖片,,拜托能不能拿點(diǎn)實(shí)際應(yīng)用案例出來(lái)啊,?
' o7 {; [9 |% ]7 o( q- g今天,,我們就來(lái)舉個(gè)栗子。. p! E. I0 g# z
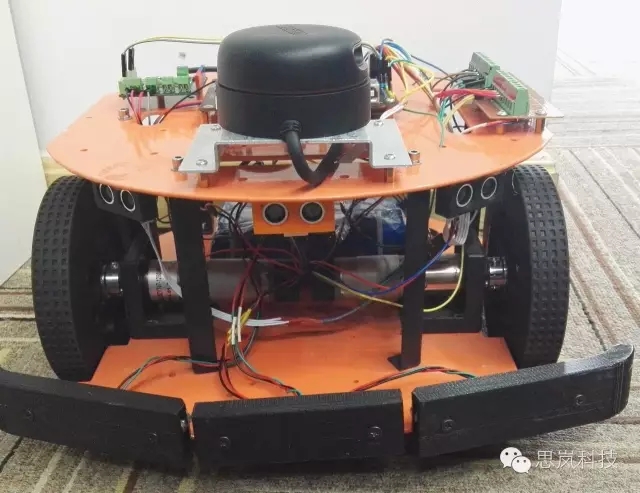
這是DFrobot推出的HCR家用機(jī)器人開(kāi)源項(xiàng)目平臺(tái),。/ R2 Q2 y$ _( K2 |% H, w! e3 G
這是一款雙輪驅(qū)動(dòng)的移動(dòng)平臺(tái),,其底盤(pán)前部配有一個(gè)牛眼萬(wàn)向輪,并配有碰撞傳感器,,可以作為在緊急剎車(chē)的觸發(fā)裝置,。
( H4 A7 W8 H$ ~" u, B作為面向教育、科研和愛(ài)好者們的開(kāi)源平臺(tái),,HCR擁有豐富的傳感器接口,,方便用戶(hù)快速搭建原型,驗(yàn)證設(shè)計(jì)思路,。+ A+ p- B8 L! U/ Y0 {; S
那么,,問(wèn)題來(lái)了~0 i4 k ^# L9 G& L) ~$ Z7 i
想把HCR變成一個(gè)可自主移動(dòng)的機(jī)器人小車(chē)需要幾步呢,?' Y$ m* ^. c7 C+ X6 |8 Y" k$ ~
這和把大象裝進(jìn)冰箱一樣,需要三步,。8 W6 G& ]* R& C6 O t
第一步,,安裝RPLIDAR。; {) K) h4 f( C* k2 O6 c
第二步,,安裝SLAMWARE,。0 l! `* d2 {2 ~5 L+ v# j- t- G: m
第三步,打開(kāi)手機(jī)APP,,想怎么玩就怎么玩,。
0 I2 V. Z3 C5 G當(dāng)然,肯定沒(méi)這么簡(jiǎn)單,,今天小編就帶你看看如何基于HCR平臺(tái)搭載SLAMWARE自動(dòng)導(dǎo)航系統(tǒng),。
3 q C4 Q$ k) p- o3 }0 k3 G1、系統(tǒng)組成* j5 F( }' I* o5 M
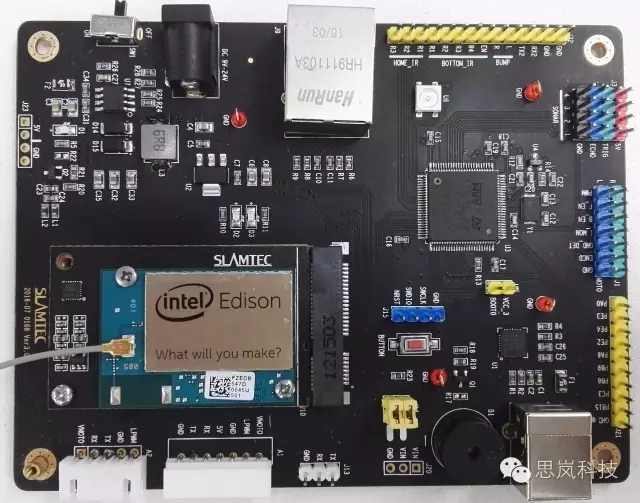
Slamware board Version 3.01 d# w0 c' N2 [ ?
RPLIDAR A2
4 D8 V8 M! v4 n0 M, mDFrobot機(jī)器人平臺(tái)(包含碰撞傳感器*3,, 超聲傳感器*3,, 2-wheel直流減速電機(jī))
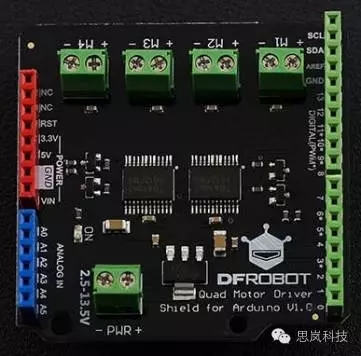
: ]4 a2 y# r. D% ?1 j3 @" d. Y! k' [電機(jī)驅(qū)動(dòng)板4 }/ x0 }6 u0 ^- e# o3 W
大電流鋰聚合電池1 P m' Z& u; H) A8 q0 l \
杜邦線若干,VCC, GND 擴(kuò)展版(自制)一塊3 c' a9 g C! @5 N+ z: N5 U7 `" ]
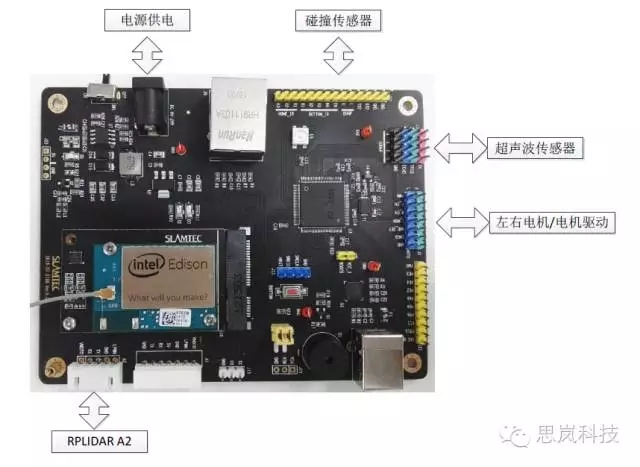
2,、結(jié)構(gòu)圖4 G, v6 I P7 O% |6 ?9 ]* x8 \* K& z
硬件平臺(tái)搭建
3 v2 ]. o u( x; W% l0 V' j8 `; k(1)搭建好HCR平臺(tái)(包含左右電機(jī),, 碰撞傳感器, 超聲波傳感器),,搭建HCR平臺(tái)的最下面兩層即可,。) u4 S$ x; A( f* w
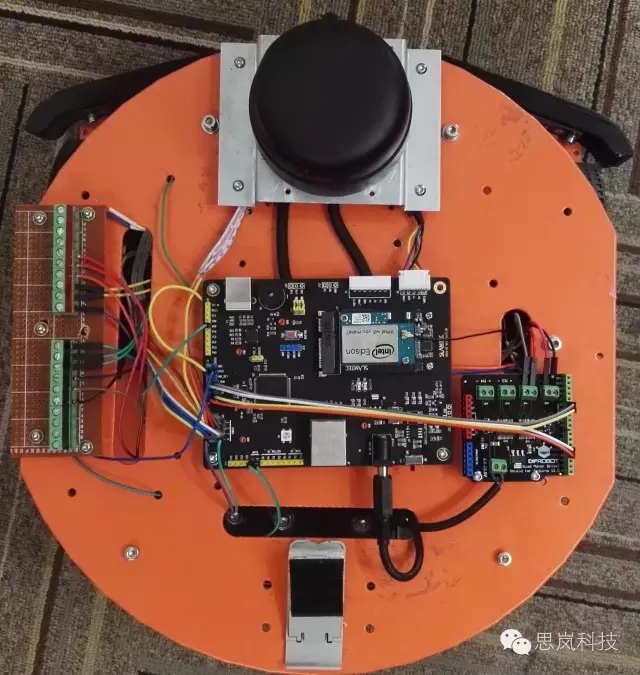
(2)固定Slamware board V3, 電機(jī)驅(qū)動(dòng)板,, RPLIDAR A2(連線方向?yàn)樾≤?chē)前進(jìn)方向,,注意不要裝反), 鋰電池(固定在底盤(pán)的最下面一層), 5V電源/GND擴(kuò)展板(下圖左側(cè)),。如圖示: % g! `, I. f! k5 E+ E
(3)連線:
: N' Q T3 c* `7 o* x2 }a.RPLIDAR: 按照上述結(jié)構(gòu)圖將RPLIDAR A2 插入板上A2插口,;
0 `$ _5 b7 L- }b.Sonar:至多支持8個(gè)超聲波傳感器(本次安裝左中右三個(gè)),分別插在板上J3位置的Sonar插口的1,、2,、3位置。超聲傳感器共有GND,、Trig,、ECHO、VCC四個(gè)引腳,,分別和板上的這四個(gè)引腳相連即可,;
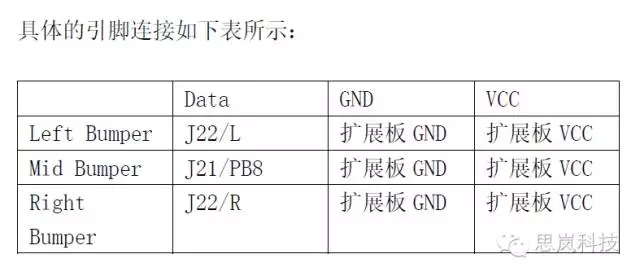
3 b" e7 c F: E- o) L/ m& C& jc.Bumper: 至多支持8個(gè)碰撞傳感器(本次同樣安裝左中右三個(gè)),碰撞傳感器的三個(gè)引腳分別為VCC,、DATA,、GND,,V3板上的J22區(qū)域目前只有左右兩個(gè)Bumper的數(shù)據(jù)接口,可以將中間Bumper的數(shù)據(jù)引腳接到GPIO上面,;
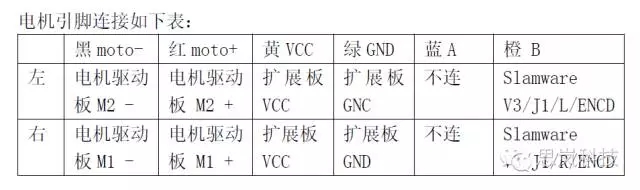
; \. B' [ }* I& H5 P# r3 N5 Yd.電機(jī)驅(qū)動(dòng)板/左右電機(jī): # I0 F+ r1 P, U6 m! t# k
硬件平臺(tái)搭建完畢之后,,我們離可自動(dòng)導(dǎo)航的HCR平臺(tái)又近了一步,下周我們會(huì)繼續(xù)介紹如何進(jìn)行固件代碼配置,。2 U `+ D8 J1 d; j
5 S: j& } U9 Z. D* B" S
作者: 韓寒11 時(shí)間: 2017-1-25 19:03
這個(gè)機(jī)器人是干嘛的,?
| 歡迎光臨 機(jī)械社區(qū) (http://97307.cn/) |
Powered by Discuz! X3.4 |