�C(j��)�^(q��)
��(bi��o)�}: ���I(y��)�C(j��)���˿���ϵ�y(t��ng)���ڙC(j��)е�O(sh��)Ӌ(j��)�������� [��ӡ���]
����: xiaobing86203 �r(sh��)�g: 2018-1-11 21:35
��(bi��o)�}: ���I(y��)�C(j��)���˿���ϵ�y(t��ng)���ڙC(j��)е�O(sh��)Ӌ(j��)��������
ʲô�ǙC(j��)���˿���ϵ�y(t��ng)
����H�H�ийٺͼ���,���˵���֫߀�Dz��܄�(d��ng)��,��һ��������?y��n)���Ըйٵ���̖�]������ȥ���պ�̎��,����һ����Ҳ����?y��n)�]�����ٰl(f��)����(j��ng)��̖,���(q��)ʹ����l(f��)���տs���揈��ͬ��,������C(j��)����ֻ�Ђ��������(q��)��(d��ng)��,���C(j��)е��Ҳ��������������ԭ���ǂ�����ݔ������̖�]��������,���(q��)��(d��ng)늄�(d��ng)�C(j��)Ҳ�ò����(q��)��(d��ng)늉������,�����ԙC(j��)������Ҫ��һ��(g��)������,����Ӳ�����ܛ���M��һ��(g��)�Ŀ���ϵ�y(t��ng),��
7 D5 s) s* H( I; b
�C(j��)���˿���ϵ�y(t��ng)�Ĺ����ǽ��Ձ��Ԃ������ęz�y��̖������(j��)�����΄�(w��)��Ҫ��,���(q��)��(d��ng)�C(j��)е���еĸ��_늄�(d��ng)�C(j��)�����҂�?n��i)˵Ļ�?d��ng)��Ҫ��ه�����ĸй�һ��,���C(j��)���˵��\(y��n)��(d��ng)�����x���_���������C(j��)������Ҫ�Â�������z�y���N��B(t��i),���C(j��)���˵ă�(n��i)����������̖���Á���ӳ�C(j��)е���P(gu��n)��(ji��)�Č�(sh��)�H�\(y��n)��(d��ng)��B(t��i),���C(j��)���˵��ⲿ��������̖���Á�z�y�����h(hu��n)����׃����
. ~, @5 k8 Y& g' i4 H* l1 `
���ԙC(j��)���˵���(j��ng)�c���X�M���������ܳ�һ��(g��)�����ęC(j��)���˿���ϵ�y(t��ng),��
0 S+ {1 Q1 U, E" I- V
�C(j��)���˵��\(y��n)��(d��ng)����ϵ�y(t��ng)������Щ����,��
��(zh��)�ЙC(j��)��(g��u)----�ŷ�늙C(j��)���M(j��n)늙C(j��)��
�(q��)��(d��ng)�C(j��)��(g��u)----�ŷ����߲��M(j��n)�(q��)��(d��ng)��,��
���ƙC(j��)��(g��u)----�\(y��n)��(d��ng)������,����·����늙C(j��)(li��n)��(d��ng)���㷨�\(y��n)����ƣ�
���Ʒ�ʽ----�й̶���(zh��)�Є�(d��ng)����ʽ��,���Ǿ;��ù̶�����(sh��)�ij���o�\(y��n)��(d��ng)������,������м�ҕ�Xϵ�y(t��ng)���������������ģ�����(j��)��������̖,���;��ò��̶�����(sh��)�ij���o�\(y��n)��(d��ng)������,��
8 b8 t( j+ V- R, U. A
2 \- h$ g# j5 _, V7 w: w: j�C(j��)���˿���ϵ�y(t��ng)�Ļ�������
1.���ƙC(j��)е��ĩ�ˈ�(zh��)�������\(y��n)��(d��ng)λ�ã�������ĩ�ˈ�(zh��)������(j��ng)�^���c(di��n)���Ƅ�(d��ng)·������
2.���ƙC(j��)е�۵��\(y��n)��(d��ng)�ˑB(t��i)�������������ɂ�(g��)���(d��ng)��(g��u)��������λ�ã�,��
3.�����\(y��n)��(d��ng)�ٶȣ�������ĩ�ˈ�(zh��)�����\(y��n)��(d��ng)λ���S�r(sh��)�g׃����Ҏ(gu��)�ɣ�,��
4.�����\(y��n)��(d��ng)���ٶȣ�������ĩ�ˈ�(zh��)�������\(y��n)��(d��ng)�^���е��ٶ�׃����,��
5.���ƙC(j��)е���и���(d��ng)���P(gu��n)��(ji��)��ݔ���D(zhu��n)�أ��������ƌ���������ʩ�ӵ�����������
6.�߂����������˙C(j��)��������,���C(j��)����ͨ�^ӛ�����٬F(xi��n)�����Ҏ(gu��)�����΄�(w��),��
7.ʹ�C(j��)���ˌ��ⲿ�h(hu��n)���Йz�y���X���ܡ����I(y��)�C(j��)�������ҕ�X,�����X,���|�X�Ȃ������M(j��n)�Мy�����R�e,���Д����I(y��)�l����׃��,��
* ?$ r7 O1 a4 @���I(y��)�C(j��)���˿���ϵ�y(t��ng)
1�����I(y��)�C(j��)���˿���ϵ�y(t��ng)Ӳ���Y(ji��)��(g��u)
1 f J/ U! y+ j/ x8 Q
�������ǙC(j��)����ϵ�y(t��ng)�ĺ���,���������P(gu��n)��˾���҇���(sh��)�Ї�(y��n)�ܷ��i,��������S����Ӽ��g(sh��)�İl(f��)չ��̎����������Խ��Խ��,�����r(ji��)��tԽ��Խ����,��Ŀǰ�Ј����ѽ�(j��ng)���F(xi��n)��1-2�����32λ̎���������ԃr(ji��)�ȵ�̎������C(j��)���˿������������µİl(f��)չ�C(j��)��,��ʹ�_�l(f��)�ͳɱ�,�������ܵęC(j��)���˿������ɞ���ܡ����˱��Cϵ�y(t��ng)��������Ӌ(j��)���c�惦����,��Ŀǰ�C(j��)���˿����������Ӌ(j��)�������^��(qi��ng)��ARMϵ��,��DSPϵ�С�POWERPCϵ��,��Intelϵ�е�оƬ�M��,��
% i3 T; H% R4 u! @5 q' H% s4 m
���⣬�������е�ͨ��оƬ�ڹ��ܺ������ϲ�����ȫ�M��ijЩ�C(j��)����ϵ�y(t��ng)�ڃr(ji��)��,������,�����ɶȺͽӿڵȷ����Ҫ���@�ͮa(ch��n)���˙C(j��)����ϵ�y(t��ng)��SoC��Systemon Chip�����g(sh��)������,�����ض���̎�����c����Ҫ�Ľӿڼ�����һ��,���ɺ���ϵ�y(t��ng)����·���O(sh��)Ӌ(j��)���sСϵ�y(t��ng)�ߴ�,�������ͳɱ�,�����磬Actel��˾��NEOS��ARM7��̎������(n��i)�˼�������FPGA�a(ch��n)Ʒ��,���γ���һ��(g��)������SoCϵ�y(t��ng),���ڙC(j��)�����\(y��n)��(d��ng)���������棬���о���Ҫ�������������ձ�,�����г���Įa(ch��n)Ʒ,��������DELTATAU��˾,���ձ�������ʽ��(hu��)��ȡ����\(y��n)��(d��ng)��������DSP���g(sh��)�����,�����û���PC���_��ʽ�Y(ji��)��(g��u),��
9 r! }% N0 l$ s( N. p: z, o, c
2�����I(y��)�C(j��)���˿���ϵ�y(t��ng)�wϵ�Y(ji��)��(g��u)
( V2 S# n Z5 R6 w2 X
�ڿ������wϵ�Y(ji��)��(g��u)����,�����о����c(di��n)�ǹ��܄��ֺ���֮�g��Ϣ���Q��Ҏ(gu��)��,�����_��ʽ�������wϵ�Y(ji��)��(g��u)�о����棬�ЃɷN�����Y(ji��)��(g��u),��һ�N�ǻ���Ӳ���Ӵ΄��ֵĽY(ji��)��(g��u),��ԓ��ͽY(ji��)��(g��u)���^���Σ����ձ�,���wϵ�Y(ji��)��(g��u)��Ӳ������A(ch��)�턝��,���������ع���ʽ��(hu��)�猢�����a(ch��n)��PA210�ɔy��ʽͨ�����ܱ�ʽ�C(j��)���˵ĽY(ji��)��(g��u)���֞���ӽY(ji��)��(g��u)����һ�N�ǻ��ڹ��܄��ֵĽY(ji��)��(g��u),������ܛӲ��һͬ���],�����ǙC(j��)���˿������wϵ�Y(ji��)��(g��u)�о��Ͱl(f��)չ�ķ���
2 g( h$ G$ K4 N* L( g1 \7 v% u
3,������ܛ���_�l(f��)�h(hu��n)��
6 n* N9 F, A4 r+ u6 {+ S
�ڙC(j��)����ܛ���_�l(f��)�h(hu��n)������,��һ�㹤�I(y��)�C(j��)���˹�˾�����Լ���(d��)�����_�l(f��)�h(hu��n)���ͪ�(d��)���ęC(j��)���˾����Z�ԣ����ձ�Motoman��˾,����KUKA��˾,��������Adept��˾,������ABB��˾��,��
5 b" g) [" z7 Y! c7 O# V; b
�ܶ��W(xu��)�ڙC(j��)�����_�l(f��)�h(hu��n)��(Robot Development Environment)�������д����о��������ṩ�˺ܶ��_��Դ�a,�����ڲ��֙C(j��)����Ӳ���Y(ji��)��(g��u)���M(j��n)�м��ɺͿ��Ʋ���,��Ŀǰ���ڌ�(sh��)�(y��n)�ҭh(hu��n)�����M(j��n)�����S�����P(gu��n)��(sh��)�(y��n)������(n��i)��F(xi��n)�еęC(j��)����ϵ�y(t��ng)�_�l(f��)�h(hu��n)����Team Bots,��v.2.0e,��ARIA��V.2.4.1,��Player/Stage,��v.1.6.5.1.6.2��Pyro.v.4.6.0,��CARMEN.v.1.1.1,��Mission Lab.v.6.0��ADE.V.1.0beta,��Miro.v.CVS-March17.2006,��MARIE.V.0.4.0,��Flow Designer.v.0.9.0��Robot Flow.v.0.2.6�ȵ�,��
- N! h: c3 C4 o- B; D, \" y
�ęC(j��)���ˮa(ch��n)�I(y��)�l(f��)չ����,�����C(j��)����ܛ���_�l(f��)�h(hu��n)���Ѓɷ��������һ�����ǁ��ԙC(j��)������K�Ñ�,���������Hʹ�ÙC(j��)����,������ϣ���܉�ͨ�^���̵ķ�ʽ�x��C(j��)���˸���Ĺ��ܣ��@�N���������Dz��ÿ�ҕ�������Z�Ԍ�(sh��)�F(xi��n)��,���瘷��M(j��n)ind Storms NXT�ĈD�λ����̭h(hu��n)����ܛRobotics Studio�ṩ�Ŀ�ҕ�����̭h(hu��n)��,��
8 l0 e/ \+ t( S; h9 ?7 g
4���C(j��)���ˌ��ò���ϵ�y(t��ng)
: Z* o \& @3 K
��1��VxWorks,��VxWorks����ϵ�y(t��ng)������Wind River��˾��1983���O(sh��)Ӌ(j��)�_�l(f��)��һ�NǶ��ʽ��(sh��)�r(sh��)����ϵ�y(t��ng)��RTOS��,����TornadoǶ��ʽ�_�l(f��)�h(hu��n)�����P(gu��n)�I�M�ɲ��֡�VxWorks���пɲü���(n��i)�˽Y(ji��)��(g��u),����Ч���΄�(w��)����,���`����΄�(w��)�gͨ�ţ��뼉���Д�̎��,��֧��POSIX1003��1b��(sh��)�r(sh��)�U(ku��)չ��(bi��o)��(zh��n),��֧�ֶ�N�������|(zh��)����(bi��o)��(zh��n)�ġ�������TCP/IP�W(w��ng)�j(lu��)�f(xi��)�h��,��
( {* R. ^7 a. X
��2��Windows CE,��Windows CE�cWindowsϵ�����^�õļ����ԣ��o����WindowsCE�ƏV��һ��(y��u)��,��WindowsCE�齨��ᘌ������O(sh��)��,���o���O(sh��)��Ą�(d��ng)�B(t��i)��(y��ng)�ó���ͷ���(w��)�ṩ��һ�N�����S���IJ���ϵ�y(t��ng)ƽ�_�������ڶ�N̎�����wϵ�Y(ji��)��(g��u)���\(y��n)��,������ͨ���m������Щ����(n��i)��ռ�ÿ��g����һ�����Ƶ��O(sh��)��,��
7 I% |# b, z5 B3 K
��3��Ƕ��ʽLinux��������Դ���a���_,���˂�����������,���ԝM���Լ��đ�(y��ng)�á����дֶ����GPL,�����_��Դ���a�����M(f��i)��,�������Լ��ĺ�(y��ng)�����Ñ��Լ���ϵ�y(t��ng),����������_�l(f��)�ˆTȺ�w,���o�茣�T���˲ţ�ֻҪ��Unix/Linux��C�Z�Լ��ɡ�֧�ֵ�Ӳ����(sh��)������,��Ƕ��ʽLinux����ͨLinux���o���|(zh��)�^(q��)�e,��PC���õ���Ӳ��Ƕ��ʽLinux����֧�֡����Ҹ��NӲ�����(q��)��(d��ng)����Դ���a�����Եõ�,�����Ñ������Լ�����Ӳ�����(q��)��(d��ng)�����ܴ�,��
' `+ p7 B: k, ]- `; _4 i& S. s
��4����C/OS-��C/OS-����������Դ���a���_�Č�(sh��)�r(sh��)��(n��i)��,���nj���Ƕ��ʽ��(y��ng)���O(sh��)Ӌ(j��)��,��������8λ��16λ��32λ��Ƭ�C(j��)��(sh��)����̖̎������DSP��,��������Ҫ���c(di��n)�ǹ��_Դ���a,������ֲ�Ժá��ɹ̻�,���ɲü���,��ռ��ʽ��(n��i)�ˡ��ɴ_���Ե�,��
$ l. p2 R. ~) d( \
��5��DSP/BIOS,��DSP/BIOS��TI��˾�e����TMS320C6000TM��TMS320C5000TM��TMS320C28xTMϵ��DSPƽ�_���O(sh��)Ӌ(j��)�_�l(f��)��һ��(g��)�ߴ�ɲü��Č�(sh��)�r(sh��)���΄�(w��)����ϵ�y(t��ng)��(n��i)��,����TI��˾��CodeComposerStudioTM�_�l(f��)���ߵĽM�ɲ���֮һ,��DSP/BIOS��Ҫ�������ֽM�ɣ��ྀ�̌�(sh��)�r(sh��)��(n��i)�ˣ���(sh��)�r(sh��)��������,��оƬ֧�֎�,�����Ì�(sh��)�r(sh��)����ϵ�y(t��ng)�_�l(f��)�����Է�����ٵ��_�l(f��)��(f��)�s��DSP����,��
9 c5 J% f) z7 J5 g- E
5,���C(j��)�����ŷ�ͨ�ſ������g(sh��)
1 s% F! M/ h0 v4 K! _6 _: L0 P
Ŀǰ���H��߀�]�Ќ����ڙC(j��)����ϵ�y(t��ng)�е��ŷ�ͨ�ſ������ڌ�(sh��)�H��(y��ng)���^����,��ͨ������(j��)ϵ�y(t��ng)����,���ѳ��õ�һЩ����,������̫�W(w��ng),��CAN��1394,��SERCOS,��USB��RS-485�����ڙC(j��)����ϵ�y(t��ng)��,����(d��ng)ǰ��ͨ�ſ��ƿ������Ԛw�{����,��������RS-485�;��(q��)��(d��ng)���g(sh��)�Ĵ��п������g(sh��)�ͻ��ڌ�(sh��)�r(sh��)���I(y��)��̫�W(w��ng)�ĸ��ٴ��п������g(sh��)��
4 m ?" U; b- Q% F/ S. l���ܙC(j��)���˿���ϵ�y(t��ng)
# \0 y9 G, Q' ~# u; z% y
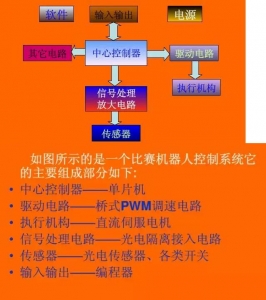
1.�_����ģ�K���Ŀ���ϵ�y(t��ng)�wϵ�Y(ji��)��(g��u)�����÷ֲ�ʽCPUӋ(j��)��C(j��)�Y(ji��)��(g��u)���֞�C(j��)���˿�����(RC),���\(y��n)��(d��ng)������(MC),����늸��xI/O���ư塢������̎����;���ʾ�̺е�,���C(j��)���˿�����(RC)�;���ʾ�̺�ͨ�^����/CAN�����M(j��n)��ͨӍ,���C(j��)���˿�����(RC)����Ӌ(j��)��C(j��)��əC(j��)���˵��\(y��n)��(d��ng)Ҏ(gu��)�������a(b��)��λ���ŷ��Լ�����߉,����(sh��)��I/O,��������̎���ȹ��ܣ�������ʾ�̺������Ϣ���@ʾ�Ͱ��I��ݔ��,��
/ P) J! V5 P" I4 n1 x4 n' ?
2.ģ�K���Ӵλ��Ŀ�����ܛ��ϵ�y(t��ng)��ܛ��ϵ�y(t��ng)�����ڻ����_Դ�Č�(sh��)�r(sh��)���΄�(w��)����ϵ�y(t��ng)Linux��,�����÷Ӻ�ģ�K���Y(ji��)��(g��u)�O(sh��)Ӌ(j��)���Ԍ�(sh��)�F(xi��n)ܛ��ϵ�y(t��ng)���_����,������(g��)������ܛ��ϵ�y(t��ng)�֞�����(g��)�ӴΣ�Ӳ���(q��)��(d��ng)��,�����ČӺ͑�(y��ng)�Ìӡ�����(g��)�Ӵηքe�挦��ͬ�Ĺ�������,������(y��ng)��ͬ�Ӵε��_�l(f��),��ϵ�y(t��ng)�и���(g��)�Ӵ�(n��i)�������ɂ�(g��)��������������ģ�K�M�ɣ��@Щ����ģ�K��f(xi��)����ͬ��(sh��)�F(xi��n)ԓ�Ӵ����ṩ�Ĺ���,��
8 b+ k7 h+ w8 ]8 Z( t, h
3.�C(j��)���˵Ĺ����\���c��ȫ�S�o(h��)���g(sh��)��ͨ�^���N��Ϣ,�����C(j��)���˹����M(j��n)��
�\�࣬���M(j��n)������(y��ng)�S�o(h��),���DZ��C�C(j��)���˰�ȫ�Ե��P(gu��n)�I���g(sh��),��
; a- ]7 S) @2 y: }. i
4.�W(w��ng)�j(lu��)���C(j��)���˿��������g(sh��)��Ŀǰ�C(j��)���˵đ�(y��ng)�ù����Ɇ��_�C(j��)���˹���վ��C(j��)�������a(ch��n)���l(f��)չ���C(j��)���˿�������(li��n)�W(w��ng)���g(sh��)׃��Խ��Խ��Ҫ,�,��������Ͼ��д��ڡ��F(xi��n)����������̫�W(w��ng)��(li��n)�W(w��ng)����,�,������ڙC(j��)���˿�����֮�g�͙C(j��)���˿�����ͬ��λ�C(j��)��ͨӍ�����ڌ��C(j��)�������a(ch��n)���M(j��n)�бO(ji��n)��,���\�����,��
& }; B# _, ]# E' W8 D" V# J$ j
����: hacjg0807 �r(sh��)�g: 2018-1-12 08:02
�W(xu��)��(x��)
����: �C(j��)�� �r(sh��)�g: 2018-1-12 08:42
̫��
����: ��ϣ9527 �r(sh��)�g: 2018-1-12 09:08
�ͮ�(d��ng)����ͳԳɣ�
����: mqchen88 �r(sh��)�g: 2018-1-12 10:55
�@��(g��)�ИI(y��)�dz��V��,���ǘ�(bi��o)�Ԅ�(d��ng)���ИI(y��)�@ô��,����λ�˽��O(sh��)������Щ��Ҫ������������]�o���_�l(f��)�,�,�����ǘ�(bi��o)��(zh��n)��Ҳ��,��ֻҪ���N·��
% W+ J3 p5 b" f4 \$ C
| �gӭ���R �C(j��)е��^(q��) (http://97307.cn/) |
Powered by Discuz! X3.4 |