|
發(fā)布時間: 2025-3-1 10:10
正文摘要:本帖最后由 hc2003 于 2025-3-1 10:39 編輯 : @6 a; `) p3 C : p( }# I$ I+ J; m* Z 有效期:90天,! 過期了,不要在聯(lián)系) ~. s* |, B: R, k+ \$ y 控制 盒“ 需實現(xiàn)如下功能:. L9 @' D7 J/ ]& u 1. 電源電壓: ... |
| 有效期:90天,,過期了,,不要在聯(lián)系了! |
|
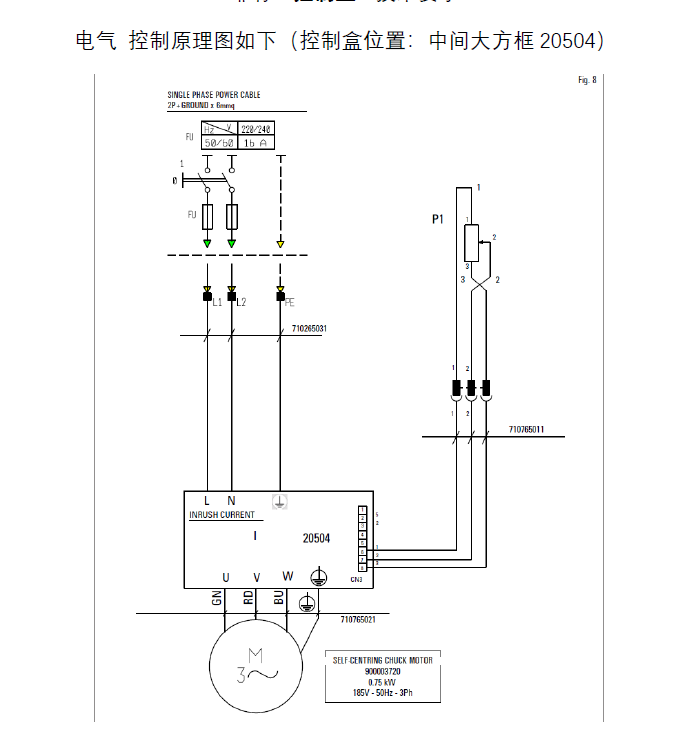
“ 控制 盒“ 需實現(xiàn)如下功能:/ a7 \$ V. y4 e6 n! h. {* K 1. 電源電壓:從單相 2 20V 50hz 輸入變成 三相 3 80V 50hz 輸出9 c c- E p) T2 I: v0 c 2. 輸出端 接三相異步電動機 工作模式 S 3 20%, 防護等級: I P44 ,;功率 0 .75KV- |, b+ B& G. x( K2 E% } 電機轉(zhuǎn)速約 1 350 ~1400 轉(zhuǎn) 分 4 極 臥式地腳安裝電動機 3. 信號輸入端:引出 3 根( 或 N 根 線,,連接到 角度傳感器( 或旋轉(zhuǎn)電位計 ));電位7 i# p0 O# I( t( I0 \) Q 計分: 0 三 個模式( 傳感器中心和 被動小齒輪 軸重合,,踩 下 或抬起腳踏,,產(chǎn)生的$ @1 y$ R. ]3 @ 角度,轉(zhuǎn)換成電信號輸入到 信號輸入端“+ h+ g0 f* _6 p& P$ C7 |/ n. T “8 z" S! B+ W4 C% u5 i. Q 0 位 狀態(tài)時 無信號輸入到控制盒,; 此時 控制盒 U V W 輸 出 端無電源,,電動機停止; “2 v6 U- \# H9 p: W 位 狀態(tài)時,,正向電流信號輸入到 控制盒 ,,此時控制盒輸出端 U V W 得電,電動" s1 h3 S( @) o z/ I6 h+ ~& i 機正向轉(zhuǎn)動,;3 i: V3 Q2 ?3 l “ 位 狀態(tài)時,,反向電流信號輸入到 控制盒,此時控制盒 輸出端 得電,,并且 其中 2 個相序變化, 任選一種: U W V 或 V U W 或 W U V ,,此時 電動機反轉(zhuǎn),。 左側(cè)大齒輪軸連接腳踏,腳踏驅(qū)動大齒輪" ^5 b f- M5 `; l& ]; |, E" R, @ 上下轉(zhuǎn)動角度( 上多,,下少不等 )),;右側(cè)小$ D: @- g' u3 ? 齒輪中心 連接 傳感器! t# L! s/ y! _; D: l 大齒輪上下均設(shè)置彈簧復(fù)位(- p1 d& t0 K* [7 j. B/ t/ b 踩后,自動 恢 復(fù) 0 位 總# o- Z# g% v& o' G: c 結(jié): 0 在一定范圍內(nèi)實現(xiàn)無極調(diào)速范圍 多 少 )),,產(chǎn)生一定范圍的正向和# y: B- U/ y+ f) C$ W 反向信號電流或電壓,,反饋給 控制盒;輸出對應(yīng) 電壓 驅(qū)動電機正反轉(zhuǎn)和一定范圍內(nèi)1 f9 s( G3 ~0 h" t7 h+ I4 T 變速運動,。. A, n& j: F" E/ @0 ^5 A5 T 傳感器( x- W( h4 {4 E' O$ k 或旋轉(zhuǎn)電位計 )和小齒輪 同步轉(zhuǎn)動產(chǎn) 生信號 ,,反饋給控制盒 大齒輪和腳 踏同步運動,驅(qū)動小齒輪產(chǎn)生角度,;大 齒 輪靜止?fàn)顟B(tài),,由正反 2 個彈簧復(fù)位,信號5 j( d0 B( ^: O7 L, a: J; v' W 位 0 ,;無電 信號輸出 |
小黑屋|手機版|Archiver|機械社區(qū) ( 京ICP備10217105號-1,,京ICP證050210號,,浙公網(wǎng)安備33038202004372號 )
GMT+8, 2025-4-4 04:49 , Processed in 0.070459 second(s), 18 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問題專業(yè),,描述清楚
問題專業(yè),,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂