weiyufe1 發(fā)表于 2018-6-20 14:26 人家是簡圖,,沒畫導軌吧 |
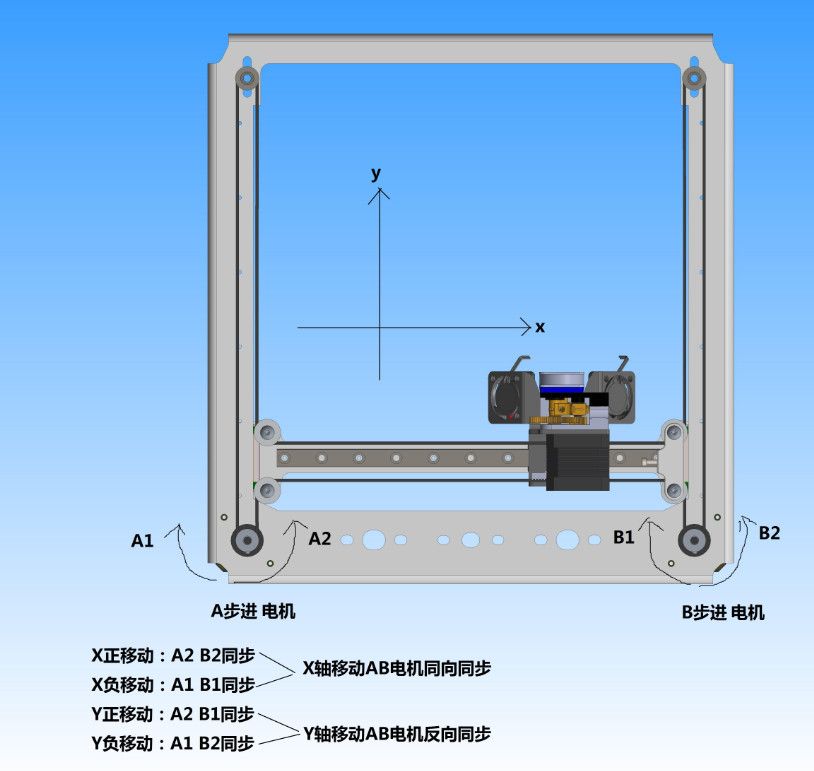
| Hbot結構,,從俯視圖上看,機器的XY運動機構類似字母“H”,。與十字軸,、I3、makerbot機器結構不同的是,,Hbot結構速度快,,沒有X軸電機一起運動的負擔,還有就是可以做得更小巧,,打印面積占比更高,。 |
weiyufe1 發(fā)表于 2018-6-20 14:26 這是種標準的機構類型,,叫COREXY,; |
weiyufe1 發(fā)表于 2018-6-20 14:26 目前市面上大部分幾千塊的3D打印機就是這種結構的,,我上圖就是3D打機機的截圖; |
| 模型圖看上去似乎有點可能,。但實際怎么樣,,試過沒有?中心的那些東西會不會根本不能固定,,會亂動的,? |
楓葉紅123 發(fā)表于 2018-6-19 22:13 這要看每次轉過的角度 |
| 總覺得用一個電機簡單可靠點 |
|
本帖最后由 843702845 于 2018-6-20 11:33 編輯 走過路過,,我也考慮考慮,。 |
楓葉紅123 發(fā)表于 2018-6-19 22:13 步進的響應速度是沒那么快的,,若勉強能用要不震動噪音很大,,這種還是伺服配減速器可靠點,或用DD馬達,。 |
小黑屋|手機版|Archiver|機械社區(qū) ( 京ICP備10217105號-1,,京ICP證050210號,,浙公網安備33038202004372號 )
GMT+8, 2025-1-29 02:58 , Processed in 0.061096 second(s), 20 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問題專業(yè),,描述清楚
問題專業(yè),,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂