|
發(fā)布時間: 2020-12-2 10:32
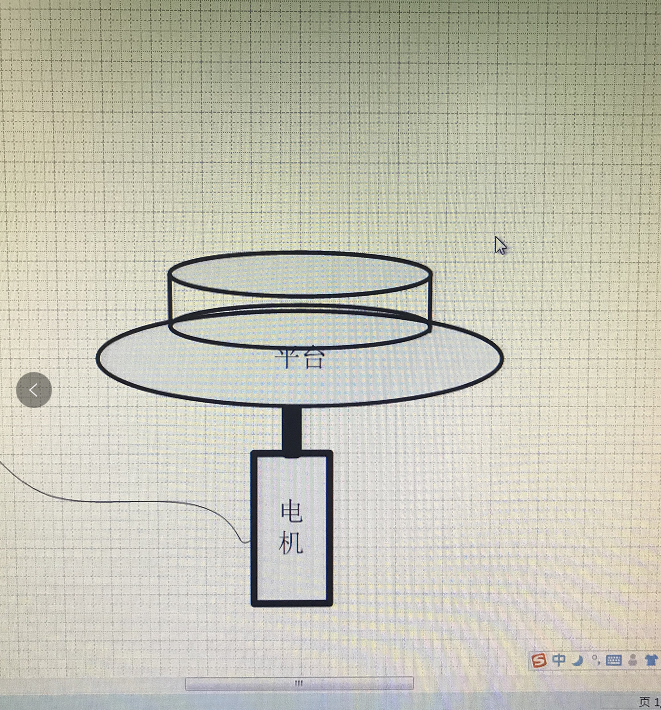
正文摘要:我這邊需要做個實(shí)驗(yàn):需求是: 1:圓形選擇平臺,,直徑400mm 2:負(fù)載也是圓形,放在平臺中心點(diǎn) ,,負(fù)載的直徑不會超過平臺:400mm 3:負(fù)載與平臺,,高度不超過200mm 4:運(yùn)行速度,需要1500 ... |
貓貳gg 發(fā)表于 2020-12-2 13:51 如果負(fù)載在低速端,,那么轉(zhuǎn)嫁到電機(jī)端的慣量, 低速端負(fù)載慣量 除以 減速比的平方=電機(jī)軸的慣量,,用這個方法確實(shí)可以匹配電機(jī),,但是這個轉(zhuǎn)速就降下來了,如果中間不使用減速裝置,,那么就需要放大伺服慣量,。 所以我想了想 還是選擇普通三相異步電機(jī) 這種電機(jī)就不需要考慮慣量匹配問題,,電機(jī)鏈接旋轉(zhuǎn)臺,通過皮帶輪做一個增速,,1,;2的增速,那么電機(jī)其實(shí)1000轉(zhuǎn),,選擇平臺就有2000轉(zhuǎn)了,,使用變頻器進(jìn)行調(diào)速。 |
|
本帖最后由 譬如朝露 于 2020-12-2 13:28 編輯 完全不明白你要做什么實(shí)驗(yàn)?慣量不匹配,?你匹配來干嘛呢,?從你的1-6條,我看不出你匹配慣量來干嘛,?慣量匹配只是與你動態(tài)穩(wěn)定性有關(guān),,既然你加減速無限制,慣量匹配有何意義,?還有你所謂的不安全與慣量匹配有何關(guān)系,?或者誰告訴你有關(guān)系?你搞錯對象了 |
| 上伺服浪費(fèi)了 |
走江湖 發(fā)表于 2020-12-4 11:58  就是轉(zhuǎn)速達(dá)不到那么高,,但是應(yīng)該比樓主自己的400轉(zhuǎn)的穩(wěn)定一些他這速度要求太快了,,難 就是轉(zhuǎn)速達(dá)不到那么高,,但是應(yīng)該比樓主自己的400轉(zhuǎn)的穩(wěn)定一些他這速度要求太快了,,難 |
| 圍觀 |
| 選擇三項(xiàng)異步電機(jī) |
很煩123 發(fā)表于 2020-12-3 17:10 你這方案 珍貴 |
|
看了一下就是一直轉(zhuǎn),?除了停機(jī)之外不停車嗎,,那上伺服浪費(fèi)了啊 |
| 伺服電機(jī)參數(shù)表里不是有慣量值嗎,你計(jì)算出機(jī)構(gòu)動態(tài)所產(chǎn)生的慣量,,接近后選用,。 |
|
可以看看DD馬達(dá),不用局限于伺服電機(jī) |
貓貳gg 發(fā)表于 2020-12-2 13:51 我看了文獻(xiàn),,如果負(fù)載慣量之間通過減速機(jī)之后,, |
小黑屋|手機(jī)版|Archiver|機(jī)械社區(qū) ( 京ICP備10217105號-1,京ICP證050210號,,浙公網(wǎng)安備33038202004372號 )
GMT+8, 2025-1-10 21:08 , Processed in 0.067781 second(s), 25 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問題專業(yè),,描述清楚
問題專業(yè),,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂