|
發(fā)布時(shí)間: 2015-10-13 10:58
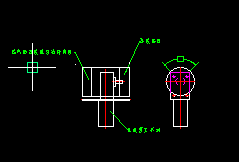
正文摘要:本帖最后由 gemiusunyi 于 2015-10-13 11:08 編輯 打算用蝸桿減速直流電機(jī)來(lái)控制機(jī)器人的彎腰動(dòng)作,,幅度大約在15-20度,, 編碼器直接感應(yīng)機(jī)構(gòu)的旋轉(zhuǎn)角度控制電機(jī)的啟動(dòng)與停止,,當(dāng)?shù)竭_(dá)預(yù)設(shè)角度時(shí)停止電機(jī),。 以前 ... |
| 效率不高,控制不精準(zhǔn) |
| LZ位這么小的圖,看啥呢 |
| 這個(gè)腰部對(duì)精度影響最大,,零點(diǎn)幾度傳遞到手腕就可能幾毫米了,。工業(yè)級(jí)的一般RV或HD減速 |
| 謝謝lz分享。 |
kayex 發(fā)表于 2015-10-13 12:32 控制方法是,編碼器不讀電機(jī)的轉(zhuǎn)速和輸出,,編碼器讀取的事整個(gè)轉(zhuǎn)動(dòng)結(jié)構(gòu)(軸承蓋和支架相對(duì)位置)的旋轉(zhuǎn)角度,, 運(yùn)行時(shí)給直流電機(jī)供電,到達(dá)指定角度時(shí)斷電,,反轉(zhuǎn)時(shí)電機(jī)電線反接通電,,到達(dá)指定角度時(shí)斷電。 這種方法還會(huì)受到蝸桿正反轉(zhuǎn)間隙的影響么 |
| 渦輪蝸桿減速器在正反轉(zhuǎn)的時(shí)候可以通過(guò)系統(tǒng)補(bǔ)償來(lái)調(diào)整,,正反用表打,,可以把誤差減少到一定程度 |
| 參與人數(shù) 1 | 威望 +10 | 收起 理由 |
|---|---|---|
|
| + 10 |
小黑屋|手機(jī)版|Archiver|機(jī)械社區(qū) ( 京ICP備10217105號(hào)-1,京ICP證050210號(hào),,浙公網(wǎng)安備33038202004372號(hào) )
GMT+8, 2025-4-5 11:42 , Processed in 0.063146 second(s), 23 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問(wèn)題專業(yè),,描述清楚
問(wèn)題專業(yè),,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂