|
發(fā)布時(shí)間: 2017-3-23 21:21
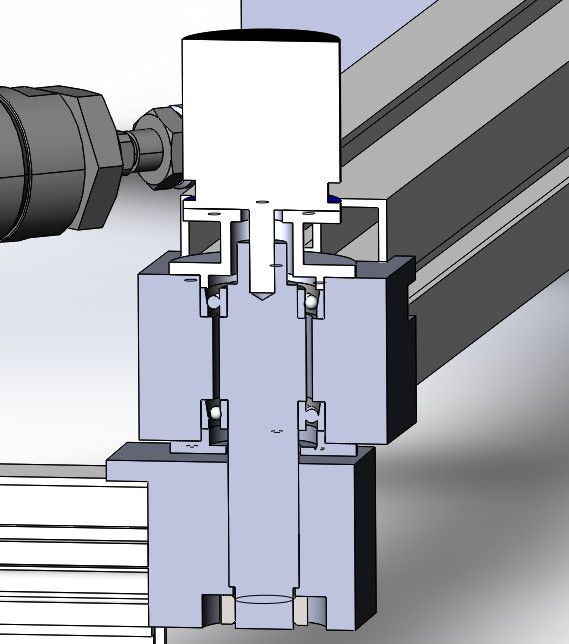
正文摘要:設(shè)計(jì)一個(gè)氣缸驅(qū)動(dòng)的機(jī)械臂,,參加為大學(xué)生舉辦的機(jī)械設(shè)計(jì)大賽,,把初步的設(shè)計(jì)模型圖片發(fā)到這里,請(qǐng)行業(yè)高手指點(diǎn)指點(diǎn),,肯定有許多問(wèn)題,! 機(jī)械臂的總體結(jié)構(gòu)如下圖所示,兩個(gè)氣缸驅(qū)動(dòng),,實(shí)現(xiàn)兩個(gè)自由度的運(yùn)動(dòng),。 ... |
| 你那兩個(gè)臂在同一個(gè)自由度里有沒(méi)意義哦,你這玩意還用氣動(dòng),,如何去控制氣缸多行程,,裝一堆傳感器?還測(cè)角度,你這玩意還不如別人手動(dòng)旋轉(zhuǎn)的攻絲機(jī)臂好使,。還節(jié)省氣缸節(jié)約錢(qián),。做這個(gè)除非把最后一臂換個(gè)自由度,做成機(jī)械手結(jié)構(gòu),,然后氣缸換成電動(dòng)推桿,。程序弄好,估計(jì)能得優(yōu)秀,。 |
u=4122661689,3277266519&fm=26&gp=0.jpg (20.28 KB, 下載次數(shù): 92)

| 這氣缸就兩個(gè)位置,,要編碼器有是沒(méi)用 |
|
ok |
| 伸縮用氣缸是個(gè)問(wèn)題,精度不夠 |
liangquan6 發(fā)表于 2017-3-24 19:20 這個(gè)方案的受力情況,,深溝球就行,,角接觸需要預(yù)緊力不好裝 |
|
最大的錯(cuò)誤,氣缸一般只有兩個(gè)位置點(diǎn),,你加編碼器是想多點(diǎn)位,。這完全沖突啊,而且鋁型材承載可以,,但是不能承受多個(gè)方向的力 |
chaozhan1992 發(fā)表于 2017-9-25 11:09 厲害了,,我也是 |
| 很厲害了!我大學(xué)啥都不懂,,就玩了幾年dota |
liangquan6 發(fā)表于 2017-3-24 19:33 這樣沒(méi)精度1.你看下你的編碼器精度,,然后根據(jù)軸長(zhǎng)就可以計(jì)算出機(jī)械臂的精度了 2.氣動(dòng)控制我覺(jué)得不會(huì)停的精準(zhǔn) |
| 掰著手指頭算了算,,估計(jì)樓主小學(xué)就注冊(cè)了 |
小黑屋|手機(jī)版|Archiver|機(jī)械社區(qū) ( 京ICP備10217105號(hào)-1,京ICP證050210號(hào),,浙公網(wǎng)安備33038202004372號(hào) )
GMT+8, 2025-3-1 11:24 , Processed in 0.068793 second(s), 27 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問(wèn)題專(zhuān)業(yè),,描述清楚
問(wèn)題專(zhuān)業(yè),,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂
