|
發(fā)布時間: 2018-10-13 11:16
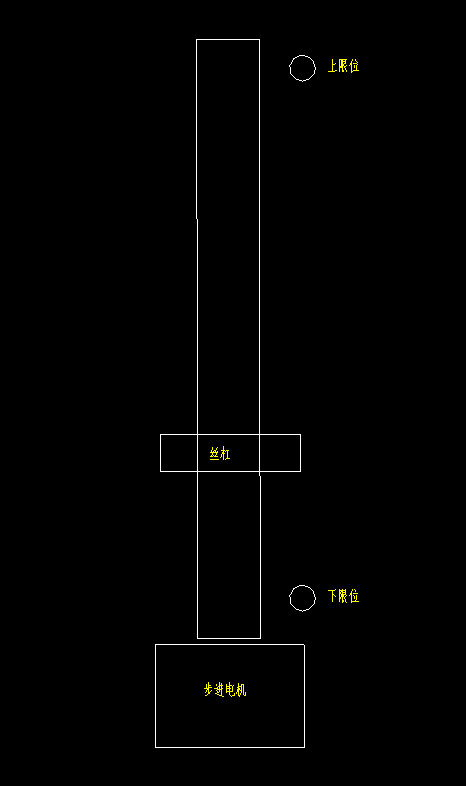
正文摘要:請教大佬幾個簡單的控制問題, 背景:如下圖,,步進電機驅(qū)動絲杠帶動平臺上下移動,,有上限位和下限位開關(guān),下限位是原點位,上限位是目標位,。 電機任意位置時回原點的動作是不是這樣的:連續(xù)給脈沖驅(qū)動絲杠帶動平臺 ... |
|
本帖最后由 DianGongN 于 2018-10-14 19:40 編輯 先簡單說一下步進電機控制原理,,然后回答LZ的問題。 常用的步進電機有A相和B相兩個繞組,,所以有4個引線,。 改變A、B繞組電流的方向,,可以前進或者后退1個步距角,,比如1.8°。對1.8°進行32細分,,可以得到0.05625°的理論精度,。細分通過改變A、B繞組電流的比值來實現(xiàn),。 通常采用成品步進電機驅(qū)動器來控制步進電機,,一般都有細分功能。細分數(shù)值一般通過微型撥動開關(guān)設(shè)定,,也可以軟件設(shè)定,。一般可設(shè)為16、32,、64,、.....256。過大的細分數(shù)值沒什么意義,,實際精度達不到,。 控制器的控制信號有2個: 1、方向信號,,比如高電平=正向,,低電平=反向; 2,、脈沖信號,,每個脈沖走0.05625°。(假定步距角=1.8°,32細分) 回答LZ問題1: Q:“問題:電機是不是可以通過限位開關(guān)來控制,,我無限連續(xù)給脈沖型號,,只要限位開關(guān)被觸發(fā)了就停止脈沖。也就不存在失步的現(xiàn)象了,,直到觸碰限位開關(guān)才停止,。” A:直接通過限位開關(guān)來控制原理上可行,,實際很少見,,一般用程序控制。限位開關(guān)作為輸入信號進入cpu�,?刂扑惴ǎ荷舷尬坏竭_時,,如果方向信號也是向上,則禁止脈沖信號,。上限位到達時,,如果方向信號是向下,則允許脈沖信號,。下限位算法類似,。 可見直接通過限位開關(guān)來控制,必須增加邏輯電路才能實現(xiàn),。LZ所說“停止脈沖”,,將使運動完全停止,無法脫離限位,。 回答LZ問題2: Q: ‘還是說電機只能按程序給多少個脈沖就走多少個脈沖,,不接受第三方指令�,!� A:一般的控制器,,就是接受方向信號和脈沖信號,只要能夠提供這2個信號即可,,無論用程序還是其他方式都可以,。比如可以簡單的用1個乒乓開關(guān)產(chǎn)生高電平和低電平來控制方向,用1個按鈕來產(chǎn)生脈沖信號控制走多少個0.05625°,,每按1次按鈕產(chǎn)生1個脈沖,。 如果沒有控制器,只要有電源,,也能直接控制步進電機的運動,這需要一定的電路知識,。 |
|
樓主,,先把機械慣性對設(shè)備的影響和步進電機的加減速考慮好了再想這個問題。 因為,,樓主提的問題,,仔細閱讀控制卡之類的說明書,差不多都有理論性答案的,。 但,,怎么把這些理論性原理結(jié)合到鐵疙瘩的運動里去,這就需要考慮負載和機械慣性,。 限位,,理論上,就是一堵墻,不論怎么編的運動程序,,只要啟用這個限位開關(guān),,運動件不會碾壓過去這個位置。 當然,,我買的控制卡,,可以啟用和關(guān)閉限位功能,不當限位開關(guān)用,,那個端口,,還可以當普通輸入點來用。 原點位,,理論上就是程序認為的基準點,,運動件,可以正負方向跨過原點運動,。 理論和實際的差別,,比如樓主的情況:檢測到了就停?怎么個“就�,!狈�,,得看負載和慣性了吧。一考慮這個,,程序的分叉口就多了去了,。 |
苗子YJ 發(fā)表于 2018-10-16 13:53 大多數(shù)現(xiàn)成的簡易控制器就有這個功能的,,買時咨詢下,。 |
苗子YJ 發(fā)表于 2018-10-16 14:09 限位信號直接控制的話,,用控制器上的使能比較好,。使能信號=高電平,允許控制器工作,;使能信號=低電平,,禁止控制器工作。我一直程序控制,,未用此信號,,把這個信號忘記了,前面社友提起才發(fā)現(xiàn),。 邏輯關(guān)系是:如果到達上限位,,方向信號向上,,則使能信號=低電平;如果到達上限位,,方向信號向下,,則使能信號=高電平; 如果到達下限位,,方向信號向下,,則使能信號=低電平;如果到達下限位,,方向信號向上,,則使能信號=高電平。 假設(shè),, 輸入信號3個 上限位信號T, T=1表示到達,;T=0表示未到 下限位信號B, B=1表示到達;B=0表示未到 方向信號D, D=1表示向上,,D=0表示向下 輸出信號1個 使能信號E,, E=1表示允許,E=0表示禁止 控制邏輯 E = not ( (T and D) or (B and not D) ) 或者文字描述 E=( (T與D) 或 (B 與 D非) )非 |
DianGongN 發(fā)表于 2018-10-14 19:30 謝謝,!請問需要加什么樣的邏輯電路可以實現(xiàn)。 控制步進方向是改變電平高低的啊,,學習了,。 |
duanyz 發(fā)表于 2018-10-13 20:22 就是想知道我這樣利于感應器來控制位移量能不能行。 |
去缸活塞泵 發(fā)表于 2018-10-13 17:39 謝謝! |
制造商 發(fā)表于 2018-10-13 15:40 好的,,謝謝,! |
shentu 發(fā)表于 2018-10-13 14:22 謝謝,! |
| 講的真好,,不錯學習了 |
|
低速低負載的情況可以 開關(guān)輸入中斷,輸出使能否,,后轉(zhuǎn)向,。 一般推薦為 開關(guān)輸入中斷,進行減速,,減速距離必須小于限位開關(guān)到碰撞的距離,,同時記錄減速脈沖數(shù),減速至靜止后,,反向發(fā)送記錄的減速脈沖數(shù),,以免丟步。 |
小黑屋|手機版|Archiver|機械社區(qū) ( 京ICP備10217105號-1,,京ICP證050210號,,浙公網(wǎng)安備33038202004372號 )
GMT+8, 2025-4-5 09:36 , Processed in 0.058508 second(s), 20 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問題專業(yè),,描述清楚
問題專業(yè),,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂